Un simulateur d’entraînement intelligent pour manipuler le bras robotique canadien
Les astronautes poursuivraient l’entraînement durant leur voyage vers Mars
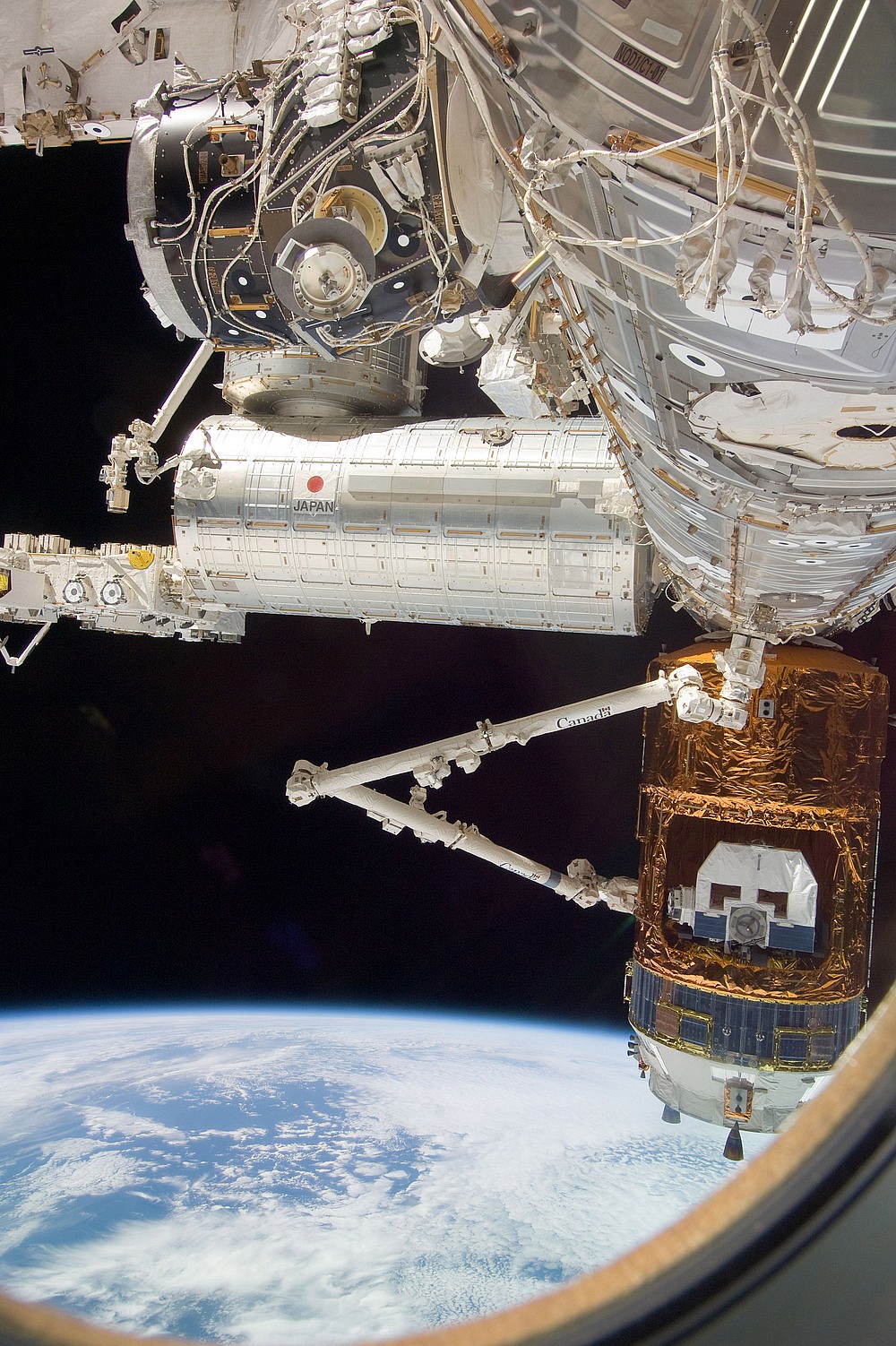
Photo : NASA
Pour manipuler sans risques le bras robotique canadien, Canadarm2, lors de missions spatiales, les astronautes suivent plusieurs semaines d’entraînement sur terre où chaque geste est minutieusement répété sur simulateur puis sur une maquette en présence d’instructeurs. Rendus dans l’espace, les opérateurs peuvent être assistés en temps réel par les spécialistes au sol pour les manœuvres délicates.
En orbite terrestre le système a fait ses preuves, mais les futures missions martiennes poseront d’autres problèmes : par quels moyens garder la formation des opérateurs astronautes à jour lors de longs voyages? Ces futures missions n’embarqueront certainement pas un bras-robot aussi grand que Canadarm2, mais bien d’autres robots spécialisés à d’autres tâches. Pourront-ils encore compter sur le soutien terrestre alors que les liaisons pourraient subir un décalage temporel?

Photo : Michel Caron
Des informaticiens de l’UdeS et leur collaborateur de l’Agence spatiale canadienne ont développé un prototype de simulateur d’entraînement intelligent pour effectuer des manipulations robotisées. S’il dépasse l’étape du prototype de recherche, un tel simulateur permettrait aux opérateurs de s’entraîner et de visionner les manœuvres les plus délicates en s’affranchissant du support des instructeurs. L’équipe composée de Froduald Kabanza, professeur au Département d’informatique de la Faculté des sciences, Khaled Belghith, docteur en informatique de l’UdeS, Roger Nkambou, professeur à l’UQAM, et Leo Hartman, de l’Agence spatiale canadienne, a publié ces résultats lors de l’International Conference on Autonomous and Intelligent Systems, du 21 au 23 juin au Portugal.
Une animation intelligente face aux imprévus
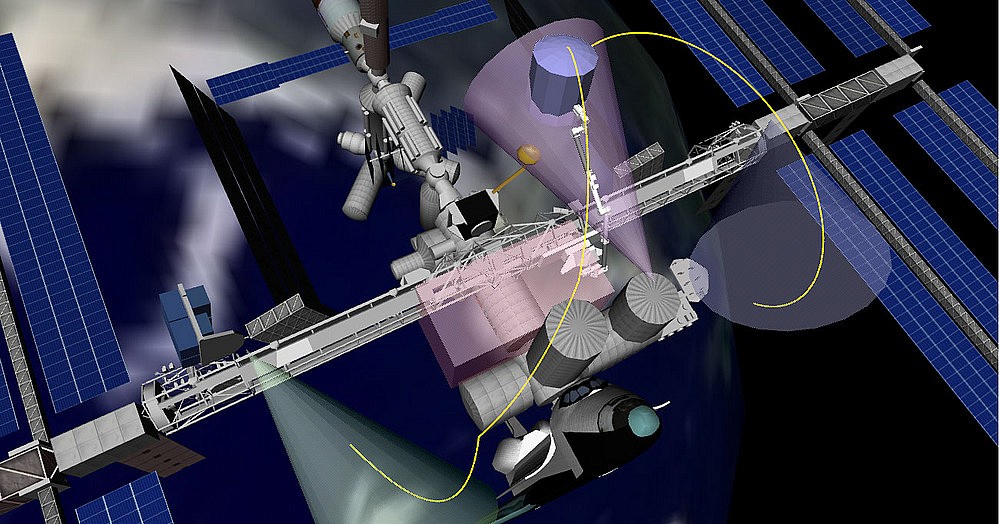
Photo : Froduald Kabanza
«Le prototype actuel permet à l’opérateur de comprendre la faisabilité de sa tâche et à la répéter grâce à un planificateur de déplacement du bras et à une animation intelligente», affirme le professeur Kabanza.
Dans la station spatiale internationale, les astronautes peuvent actuellement visionner les mouvements du bras sur trois écrans qui diffusent les images captées par quatorze caméras. «Le simulateur suggère les caméras à afficher pour choisir les angles de prise de vue les plus visuels, explique le chercheur. Grâce à l’algorithme de planification de déplacement, le simulateur peut avertir l’opérateur lorsque ses manœuvres comportent des risques de collision avec un élément de la station (contrainte dure), de mauvaises positions du bras (singularité du bras), ou encore lorsque le bras n’est pas dans les champs de caméras adéquats pour visionner au mieux l’opération (contrainte flexible)», ajoute-t-il.
Le système permettrait aux opérateurs embarqués dans une navette de s’adapter rapidement à certains imprévus. «Il suffit par exemple que l’axe de la station change de quelques degrés par rapport au soleil pour qu’une caméra initialement prévue pour contrôler une opération devienne surexposée et ne soit plus alors adéquate. Dans ce cas, tout le travail de planification est à refaire au sol, ce qui peut ralentir la mission», mentionne l’informaticien.
D’autre part, lorsque l’appui des experts au sol est requis, ceux-ci envoient aux opérateurs en mission des fichiers infographiques volumineux. Si le simulateur est embarqué en mission, il peut créer automatiquement des tâches d’entraînement adaptées aux besoins de formation continue de chaque astronaute, bien plus que l’on ne pourrait les créer manuellement, en plus de guider intelligemment l’astronaute.
Ce projet financé par le Conseil de recherches en sciences naturelles et en génie du Canada et l’Agence spatiale canadienne pourrait conduire à enrichir la formation des astronautes en préparation des prochaines missions spatiales.