SAFiR Lab : une première année marquée par une croissance fulgurante

Photo : Fournie
À peine un an après son implantation au 3IT, le groupe de recherche SAFiR (Sherbrooke Autonomous Field Robotics) Lab montre déjà un dynamisme remarquable dans le domaine de la robotique intelligente en environnement réel.
SAFiR est dirigé par le professeur Louis Petit, qui est de retour au 3IT depuis janvier 2025 après un postdoctorat à McGill University. Il dirige le groupe de recherche avec cette mission : soutenir l’intégration de robots intelligents au bénéfice de la société en améliorant leur compréhension des environnements réels et leur capacité à réagir de manière optimale aux situations variées.
Le SAFiR Lab s’est rapidement retrouvé au cœur de projets variés, témoignant de l’intérêt croissant envers la robotique intelligente dans une multitude de secteurs, dont l’énergie, l’aviation, la défense, la conservation, l’inspection, l’agriculture et l’automatisation, des domaines qui doivent composer avec des enjeux tels que le vieillissement des infrastructures, les tensions géopolitiques et les impacts des changements climatiques.
Louis Petit, directeur du SAFiR Lab
Les robots sont développés pour répondre à des défis techniques majeurs qui nécessitent de surveiller efficacement de vastes environnements non structurés avec un minimum de supervision. « Ils doivent soutenir les humains de façon efficace et sécuritaire, tout en favorisant une collaboration robot-humain dans les opérations où l’expertise humaine demeure indispensable, comme les missions de sauvetage », ajoute-t-il.
Les projets scientifiques en cours au SAFiR Lab illustrent l’expertise du groupe au niveau de la navigation adaptative, la représentation compacte d’environnement, la perception résiliente, la coordination multi-robots et la collaboration humain-robot.
Louis Petit est chercheur affilié au Mila – Institut québécois d’intelligence artificielle, ainsi qu’à l’Institut nordique du Québec et siège sur le comité scientifique du CRIAQ - Consortium de recherche et d’innovation en aérospatiale du Québec.
Afin d'illustrer l'étendue des activités de recherche au SAFiR Lab, voici quelques exemples de projets en cours de réalisation qui mettent en action des robots aériens, terrestres et aquatiques.
Navigation autonome adaptative
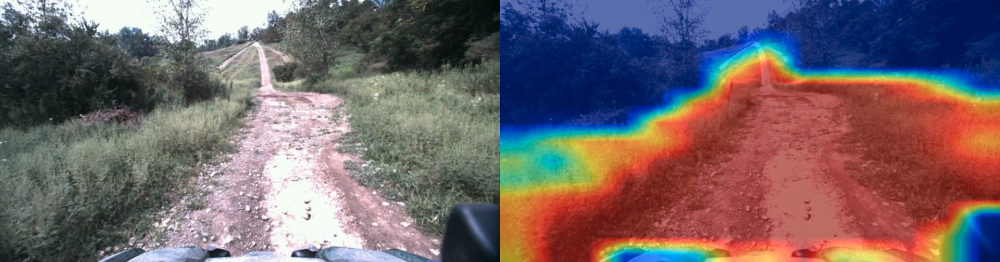
Photo : Fournie
Ce projet porte sur la navigation adaptative de véhicules en terrain non structuré. Selon la mission, les objectifs peuvent varier : aller très vite lors d’opérations de recherche et sauvetage, minimiser la consommation d’énergie pour des missions prolongées, ou privilégier la sécurité dans des environnements particulièrement exigeants. Ces critères entrent parfois en conflit, la trajectoire la plus sécuritaire n’est pas toujours la plus rapide, et le chemin le plus court peut frôler des obstacles. L’enjeu consiste donc à développer des stratégies décisionnelles qui s’adaptent au contexte.
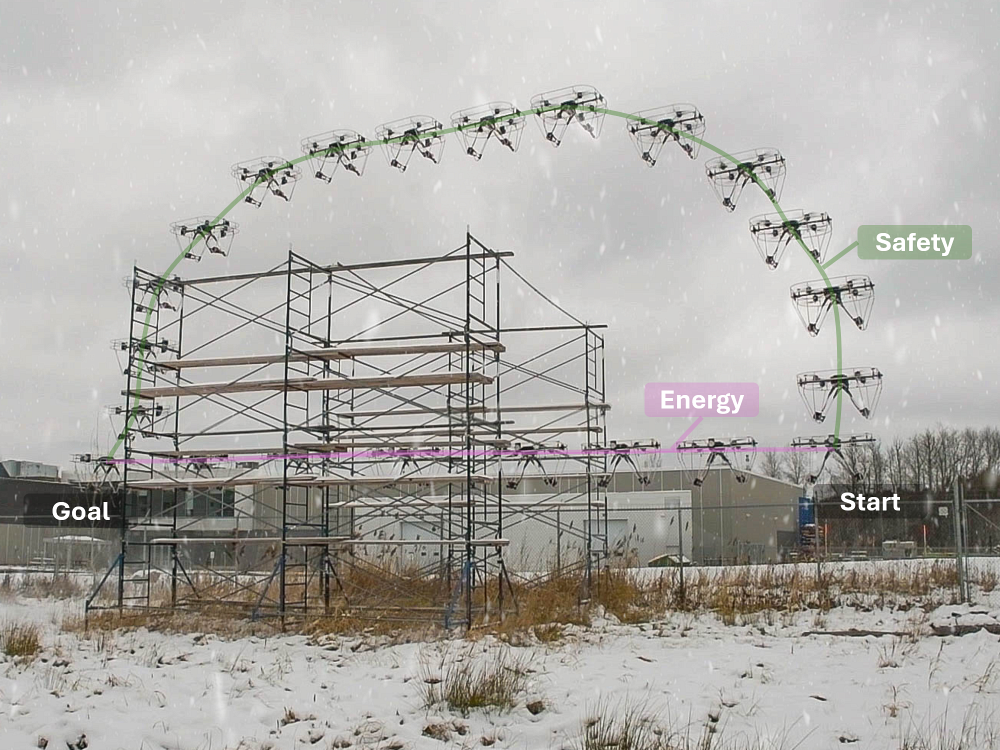
Photo : Fournie
Faits saillants
- Le doctorant David-Alexandre Poissant a reçu la bourse Eurêka pour ce projet.
- L’équipe de recherche a été invitée à un événement scientifique privé organisé par Skydio lors de la conférence ICRA 2025, rassemblant les scientifiques les plus reconnus dans le domaine. Ce leader américain en drone avait remarqué l’expertise sherbrookoise.
- Ce projet de navigation adaptative pour un drone d’inspection de lignes électriques a fait l'objet de deux publications scientifiques : lire l'article MOAR Planner et ARENA.
Exploration spatiale
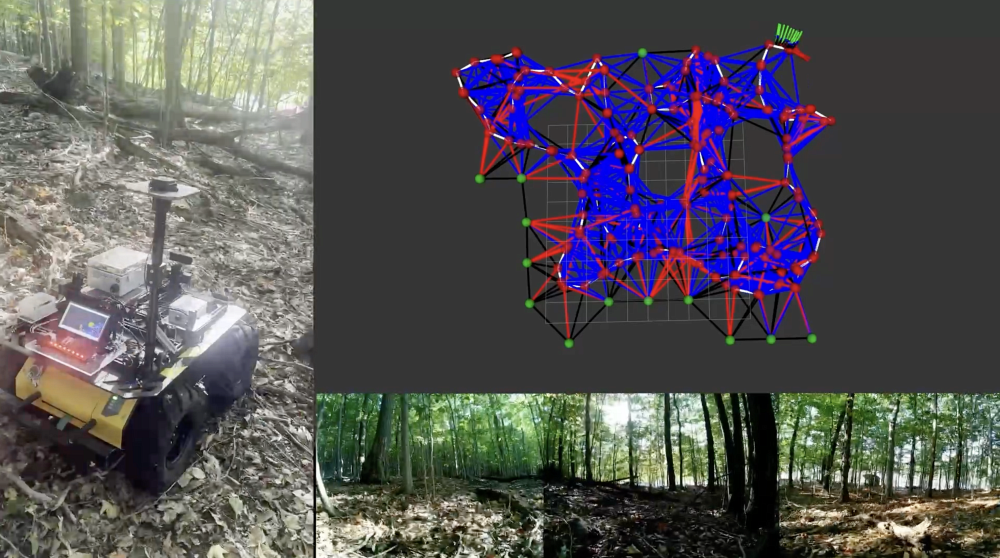
Photo : Fournie
En collaboration avec des spécialistes en géomatique, ce projet vise à développer des robots capables d’explorer et de cartographier de manière autonome des environnements extrêmes. Pour mettre ces technologies à l'épreuve dans des conditions comparables à celles de missions lunaires ou martiennes, l’équipe mènera une mission scientifique en Arctique, un milieu analogue reconnu pour ses contraintes sévères et sa grande valeur scientifique.
Découvrez deux publications scientifiques
- Publication portant sur le projet d'exploration autonome avec un drone.
- Publication portant sur le projet d'exploration autonome avec un robot terrestre.
Collaboration multi-robots
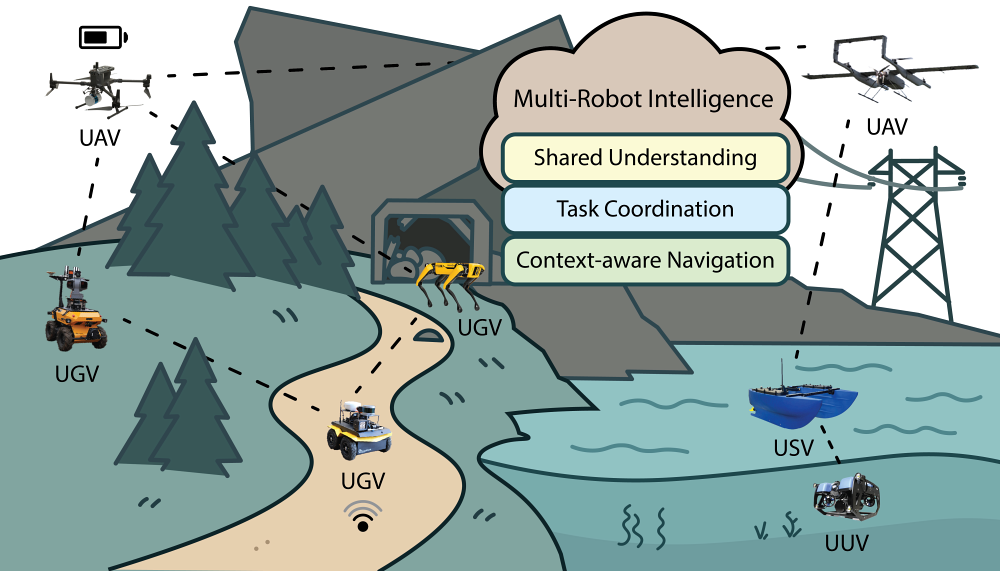
Photo : Fournie
Ce projet vise à développer des robots capables de collaborer pour cartographier et analyser divers environnements. L’objectif pourrait être d’améliorer la durabilité des infrastructures, comme les lignes électriques, grâce à des missions d’inspection intelligentes. Au cours de ces missions, les robots pourraient repérer des zones potentiellement à risque, assurer la sécurité des installations et identifier les signes de vieillissement des infrastructures.
Ce projet comporte trois défis majeurs :
- La représentation précise de l’environnement, nécessaire pour permettre aux robots de comprendre et de modéliser leur espace d’intervention.
- Le partage optimal des tâches entre les robots.
- La navigation résiliente à long terme, qui doit garantir que chaque robot puisse s’adapter au contexte, maintenir sa mission malgré les perturbations et opérer de manière économe en énergie.
Faits saillants
- L’étudiant Tim Bary a remporté le prix de la deuxième meilleure affiche scientifique portant sur le partage de tâches entre plusieurs agents (humains ou robots) à la conférence IEEE BHI (Biomedical and Health Informatics) ainsi que le prix NSF-EMBS-Google Young Professionnal Recognition.
- Tim Bary a également présenté son projet au Bistrobrain : visionner la présentation.
- Un deuxième sur le partage optimal des tâches entre les agents a été diffusé : lire la publication.
Détection de plantes rares
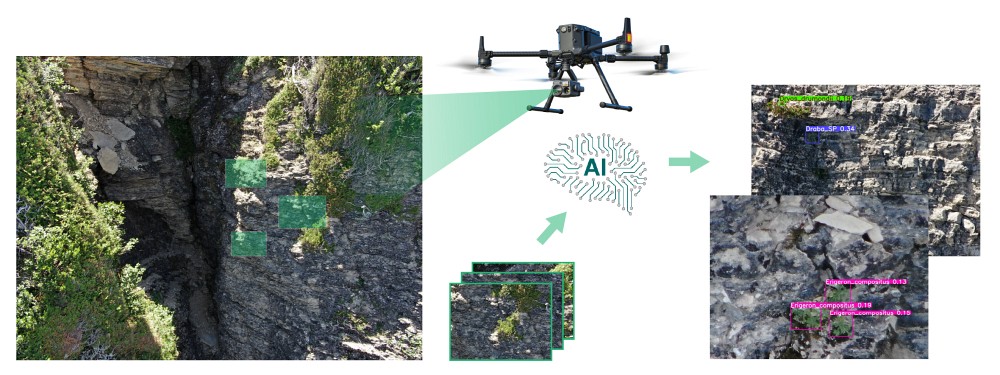
Photo : Fournie
Ce projet allie intelligence artificielle et drones afin de faciliter le repérage d’une dizaine d’espèces végétales rares situées sur les falaises du parc national Forillon, en Gaspésie. Il vise à développer un modèle d’intelligence artificielle capable de reconnaître les plantes rares, entraîné à partir de données limitées, dans ce cas, quelques photos de plantes annotées manuellement.
Distinction
- Récipiendaire d'une bourse d'excellence en recherche, l'étudiant Édouard Moffet consacrera sa maîtrise sur ce projet porteur. Apprenez-en plus en lisant la nouvelle.
Cartographie de la santé des lacs

Photo : Fournie
La présence de plantes envahissantes et de la moule zébrée est un enjeu dans les lacs en Estrie. Ce projet vise à utiliser des robots marins pour cartographier la santé des écosystèmes aquatiques. Des spécialistes en géomatique et en chimie identifieront les indicateurs les plus pertinents pour évaluer l’état des écosystèmes, ils seront ensuite intégrés à des robots aquatiques capables de les mesurer à grande échelle.
Alors que les données satellites permettent d’avoir un premier aperçu de ce qui se passe dans les lacs, les robots fourniront des informations plus détaillées directement dans l’eau, pour une cartographie plus fine et précise de leur santé.
Navigation sans GPS
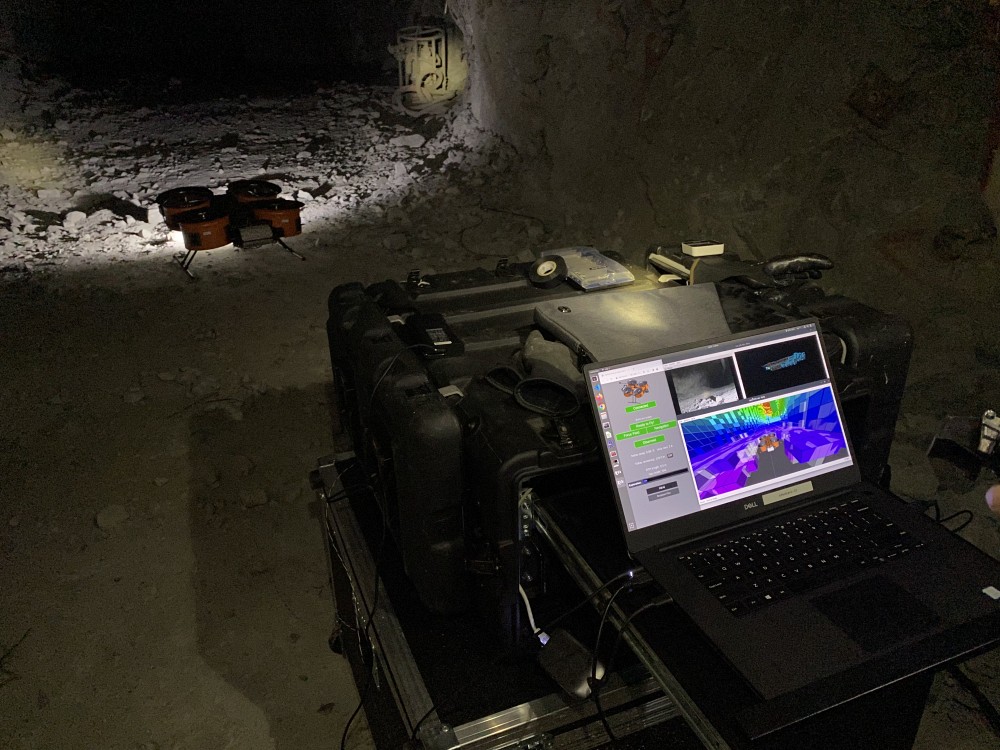
Photo : Fournie
Ce projet concerne la navigation de robot sans GPS. Dans des zones où le GPS est brouillé ou indisponible, un robot peut perdre l’accès à la localisation satellite. Il doit alors se localiser grâce à ses capteurs embarqués. Au même titre qu’un humain avance en observant son environnement, le robot utilise ses caméras ou capteurs pour estimer sa position et son mouvement. Cette estimation peut dériver avec le temps, mais le robot est capable de corriger l’erreur lorsqu’il revient dans un endroit déjà visité ou reconnaissable, en recalant sa position grâce aux repères connus.
Faits saillants
- Un article scientifique a été diffusé portant sur la navigation d’un drone de cartographie des mines souterraines sans GPS.
- Cet article a remporté le prix de meilleur article étudiant à la IEEE SMC2021 - International Conference on Systems, Man, and Cybernetics et deuxième meilleur article.
- Visionnez la vidéo d'exploration autonome.