Réconcilier force et finesse : au cœur d’une avancée majeure en robotique collaborative
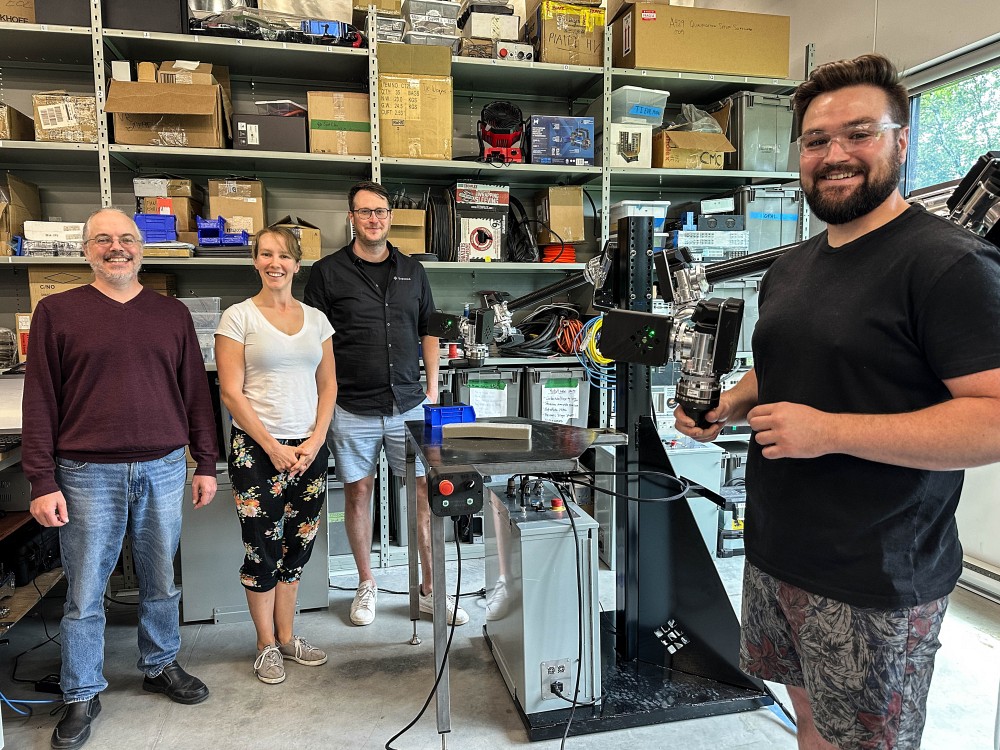
Photo : Fournie
Et si les robots pouvaient interagir avec nous comme le ferait un être humain? C’est le pari audacieux qu’a décidé de relever le professeur Jean-Sébastien Plante, du Département de génie mécanique de la Faculté de génie. Son équipe a récemment publié les résultats de son étude dans la section Scientific Reports du prestigieux site Nature.
L’étude intitulée Bridging the gap between haptic devices and cobots with highly geared magnetorheological actuators propose une solution à l’un des principaux défis de la robotique collaborative : concevoir un robot capable à la fois de déployer une force importante, comme le ferait un robot industriel, tout en étant suffisamment sensible pour réaliser des tâches délicates avec précision, comme le ferait un être humain.
L’intelligence du mouvement grâce à l’utilisation des fluides magnétorhéologiques
Au cœur de cette avancée se trouvent les actionneurs magnétorhéologiques (MR), qui utilisent un fluide composé d’huile et de particules de fer. Sous l’effet d’un champ magnétique, la viscosité du fluide est instantanément modifiée en passant de solide à liquide, et inversement, offrant ainsi un contrôle d'une finesse inégalée en matière de mouvement.
Après 18 ans de recherche et de développement sur cette technologie, financés entre autres par Bell Helicopter Textron Canada, l’équipe du Pr Jean-Sébastien Plante a développé la connaissance permettant de contourner deux limitations fondamentales des actionneurs traditionnels : la lourdeur de l’inertie mécanique et le manque de précision dans le rendu de la rigidité. Ainsi, en ajoutant un petit embrayage magnétorhéologique de quelques grammes à la bonne place dans un actionneur à moto-réduction standard, on transforme complètement son comportement. Tout en conservant une excellente densité de force, on ajoute une délicatesse et un rendu de la rigidité exceptionnels, rendant les robots plus agiles, plus sûrs et plus proches des capacités humaines.
Les fluides magnétorhéologiques, pourtant découverts dans les années 1940, n’avaient encore jamais été appliqués au domaine de la robotique et étaient surtout utilisés dans les amortisseurs des suspensions automobiles de façon semi-active. En effet, le fluide offrait un contrôle partiel en maitrisant uniquement la quantité d’énergie extraite du système sans pouvoir en ajouter.
La vision de départ est simple : comment faire pour contrôler le mouvement aussi bien, voire mieux, que les muscles humains? Quand je suis arrivé à l’Université de Sherbrooke en 2007, il y avait déjà une équipe qui travaillait sur les fluides magnétorhéologiques, celle du Pr François Michaud. Quand j’ai vu ce qu’ils faisaient avec ce fluide, en les combinant avec un moteur électrique, j’ai eu un déclic et j’ai su qu’il y avait du potentiel pour faire un contrôle total des systèmes, pleinement actif. Avec cette approche non conventionnelle, on ne cherche pas seulement à enlever de l’énergie mais également à en ajouter. C’est un jeu de puissance qui se fait en temps réel. Les fluides magnétorhéologique ont cette particularité de pouvoir changer d’état en une fraction de seconde. En jumelant cette technologie avec des capteurs et éventuellement l’intelligence artificielle, on obtient des appareils qui s’ajustent instantanément à nos besoins, et qui pourront même un jour les anticiper.
Pr Jean-Sébastien Plante, Département génie mécanique, Faculté de génie
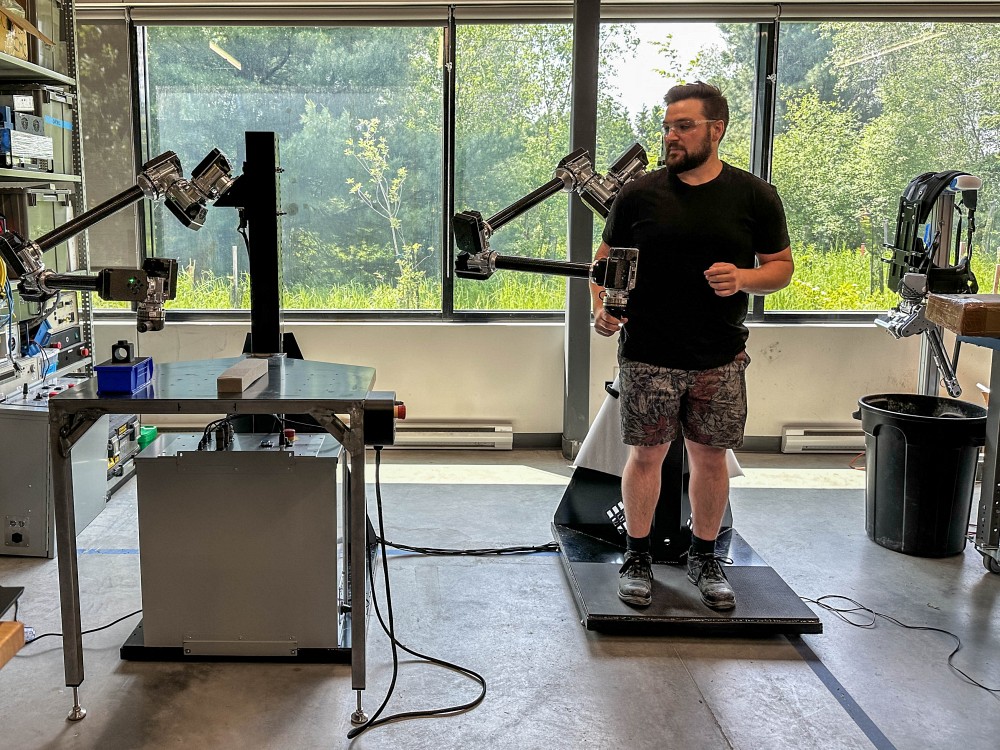
Photo : Fournie
Inspiré par la nature, conçu pour la société
Ce travail s’inscrit dans une vision claire : créer des robots qui interagissent avec les humains de manière intuitive, fluide et sécuritaire. L’objectif est de servir la société, là où la machine ne peut fonctionner seule à l’heure actuelle, que ce soit dans des environnements restreints comme des serres agricoles, pour des tâches répétitives ou encore pour accompagner les personnes à mobilité réduite. Ces technologies ouvrent la voie à des usages concrets, qui s’inscrivent directement dans un objectif d’amélioration de nos milieux de vie.
Pr Catherine Véronneau qui a obtenu son doctorat en 2021, sous la direction du Pr Jean-Sébastien Plante et du Pr Alexandre Girard, et nouvellement embauchée comme professeure au département de génie mécanique de l’UdeS, pousse cette vision encore plus loin en appliquant cette technologie au domaine de la santé. Son programme de recherche : concevoir des membres robotiques surnuméraires (SRLs), montés sur le corps, pour aider les aînés à rester actifs. Ce système combine les avantages des robots d’assistance actuels : les exosquelettes et les robots à effecteur terminal, pour offrir une assistance souple et adaptée aux besoins et à la physiologie des personnes âgées.
En collaboration avec le Centre de recherche sur le vieillissement (CdRV), son programme de recherche novateur vise à rendre cette technologie accessible à l’extérieur des laboratoires, en milieu réel pour favoriser l'autonomie et la qualité de vie.
Une collaboration porteuse d’avenir
Ce projet bénéficie également de l’expertise d’Exonetik, une entreprise sherbrookoise spécialisée en robotique et co-fondée par le Pr Jean-Sébastien Plante. Celle-ci participe activement au développement de la technologie en étroite collaboration avec l’UdeS. En accueillant des étudiants issus de la Faculté de génie, ce projet illustre parfaitement l’écosystème d’innovation propre à l’Université de Sherbrooke, où formation et industrie collaborent pour imaginer des solutions concrètes et humaines aux défis technologiques.